-
Book Overview & Buying

-
Table Of Contents

-
Feedback & Rating

Drone Development from Concept to Flight
By :
Drone Development from Concept to Flight
By:
Overview of this book
Unlock opportunities in the growing UAV market where drones are revolutionizing diverse sectors like agriculture, surveying, and the military. Using the vast experience of the author in drone domain, this book provides step-by-step guidance through the complete drone development life cycle, from concept to pilot stage, prototyping, and ultimately, a market-ready product, with domain-specific applications.
Starting with an introduction to unmanned systems, principles of drone flight, and it's motion in 3D space, this book shows you how to design a propulsion system tailored to your drone’s needs. You’ll then get hands on with the entire drone assembly process, covering airframe, components, and wiring. Next, you’ll enhance drone connectivity and navigation with communication devices, such as RFD900, Herelink, and H-16 Pro GCS and hardware protocols like I2C, and UART. The book also guides you in using the open-source flight software Ardupilot and PX4, along with firmware architecture and PID tuning for advanced control. Additionally, you’ll go learn about AeroGCS, Mission Planner, and UGCS ground control stations, tips for maiden flight and log analysis for optimizing performance while building a custom survey drone with a 60-min endurance, 10km range, live video feed, and photography options.
By the end of this book, you’ll be equipped with all you need to build and fly your own drones and UAVs.
Table of Contents (19 chapters)
Preface

Part 1: Fundamentals of Flight Engineering
 Free Chapter
Free Chapter
Chapter 1: Getting Started with UAV and Drone Engineering
Chapter 2: Understanding Flight Terminologies and the Physics of Motion
Chapter 3: Learning and Applying Basic Command and Control Interfaces
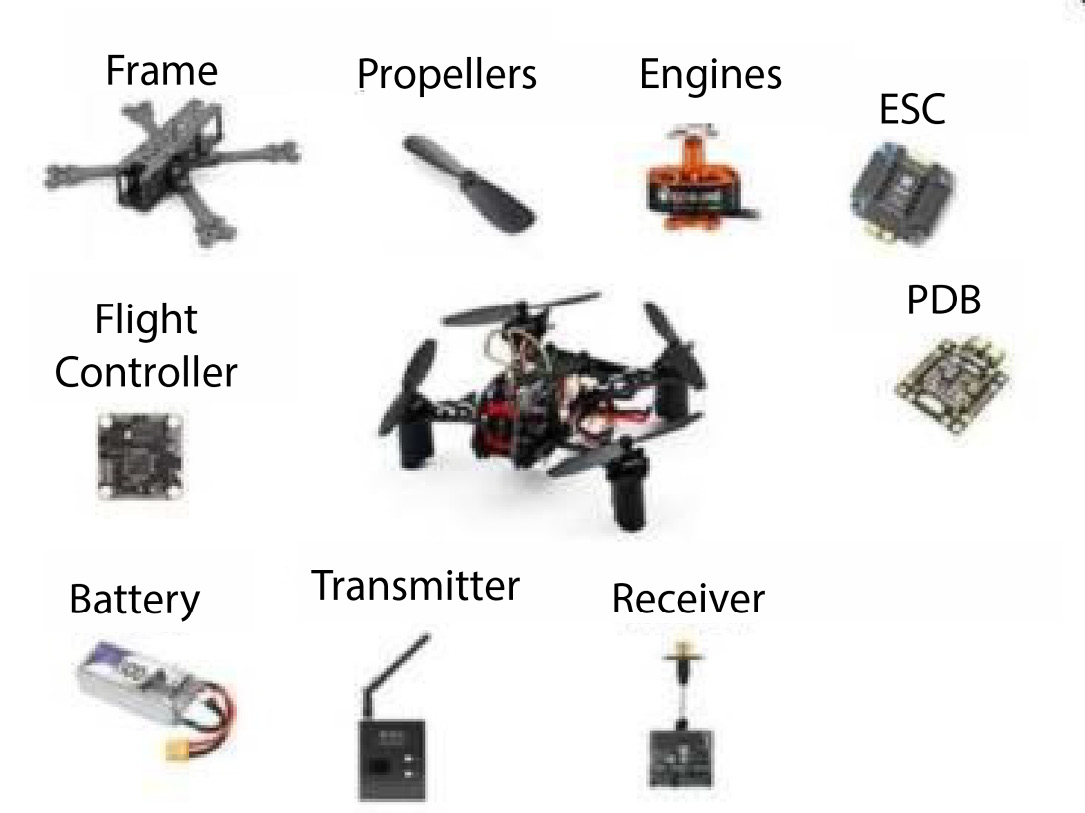
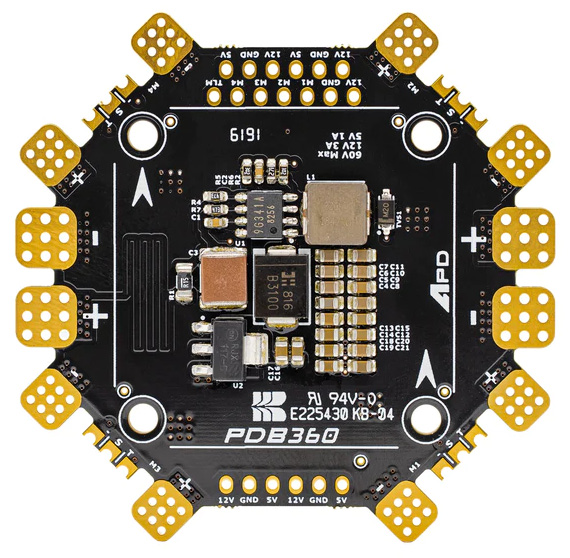
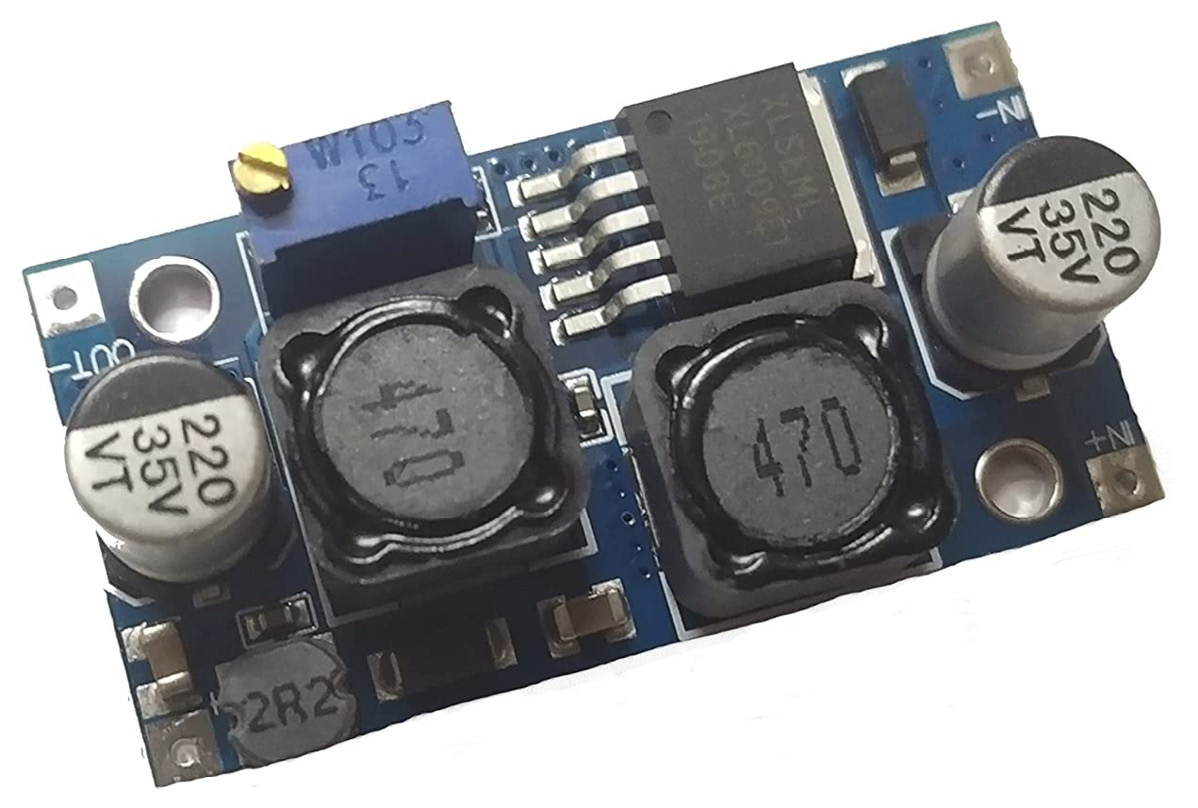
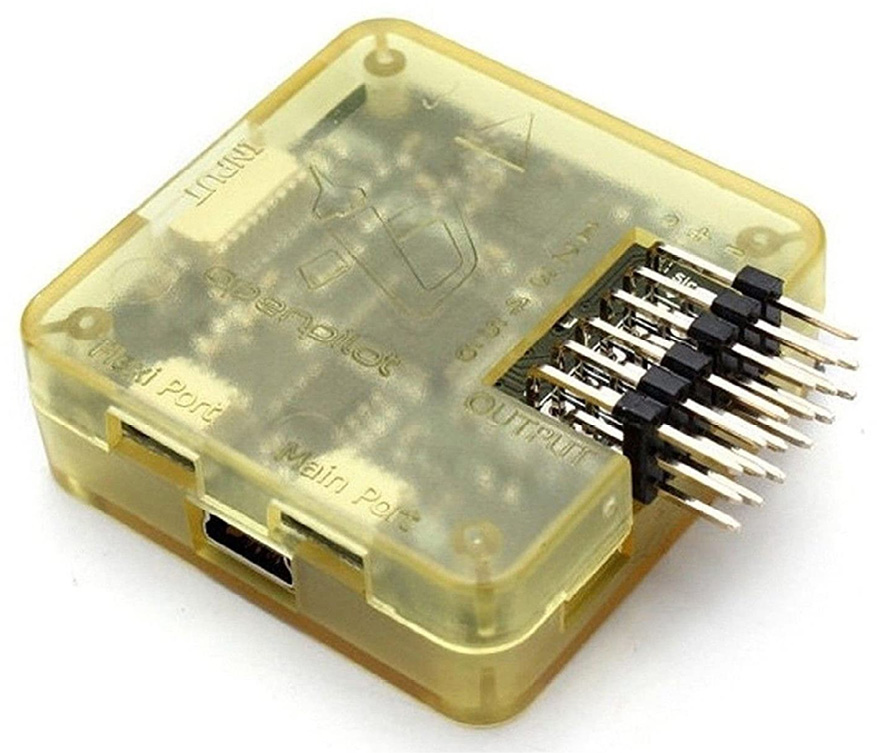
Chapter 4: Knowing UAV Systems, Sub-Systems, and Components
Part 2: System Conceptualization and Avionics Development
Chapter 5: The Application of Sensors and IMUs in Drones
Chapter 6: Introduction to Drone Firmware and Flight Stacks
Chapter 7: Introduction to Ground Control Station Software
Chapter 8: Understanding Flight Modes and Mission Planning
Part 3: Configuration, Calibrations, Flying, and Log Analysis
Chapter 9: Drone Assembly, Configuration, and Tuning
Chapter 10: Flight Log Analysis and PIDs
Chapter 11: Application-Based Drone Development
Chapter 12: Developing a Custom Survey Drone
References
Index
Customer Reviews