





In the previous chapter, we selected a DC-geared motor with an encoder from Pololu and an embedded board from Texas Instruments, called Tiva C LaunchPad. We need the following components to interface the motor with LaunchPad:
- Two Pololu metal gear motors, 37Dx73L mm with 64 counts per revolution encoder
- Pololu wheel, 90x10 mm and a matching hub
- Pololu dual VNH2SP30 motor driver carrier, MD03A
- A sealed lead acid/lithium ion battery of 12V
- A logic level convertor of 3.3V to 5V; visit https://www.sparkfun.com/products/11978.
- A Tiva C LaunchPad and its compatible interfacing wires
The following diagram shows the interfacing circuit of two motors using Pololu H-Bridge:
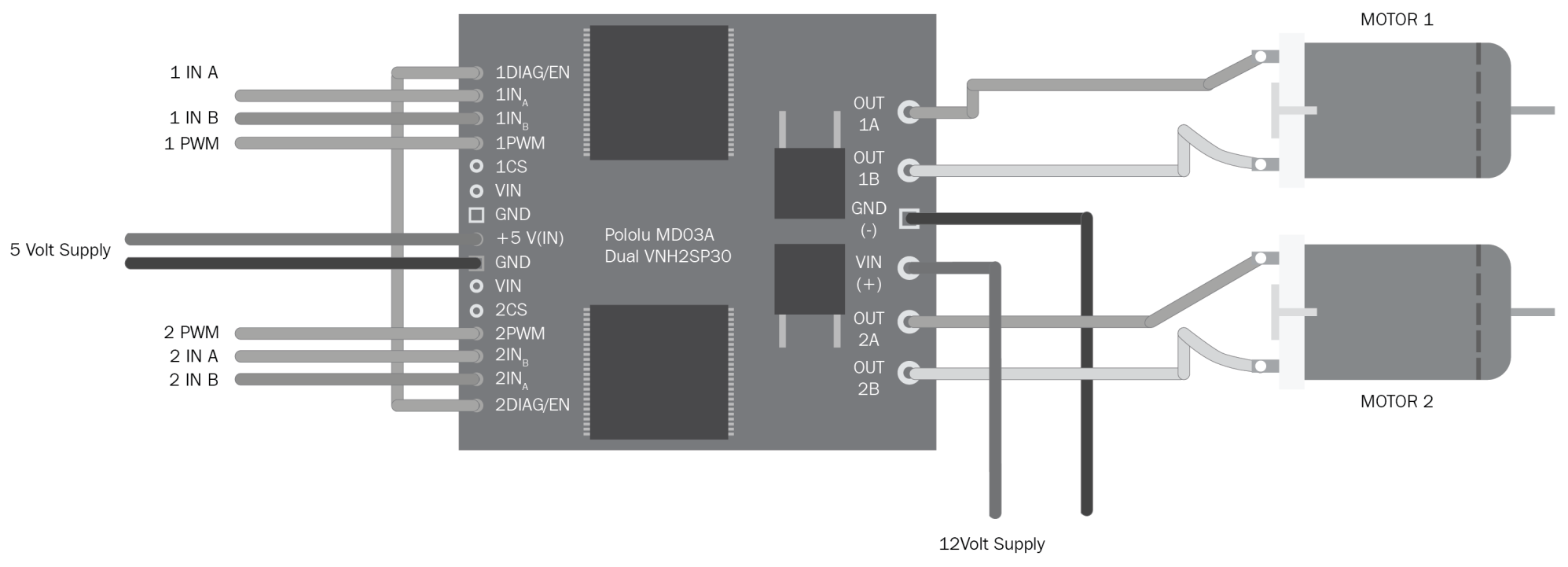
Motor interfacing circuit
To interface with Launchpad, we have to connect a level shifter board in between these two motors. The motor driver works in 5V but the Launchpad...






